机械臂上的相机
Stereo双目立体相机可在动态环境中精确进行智能图像处理
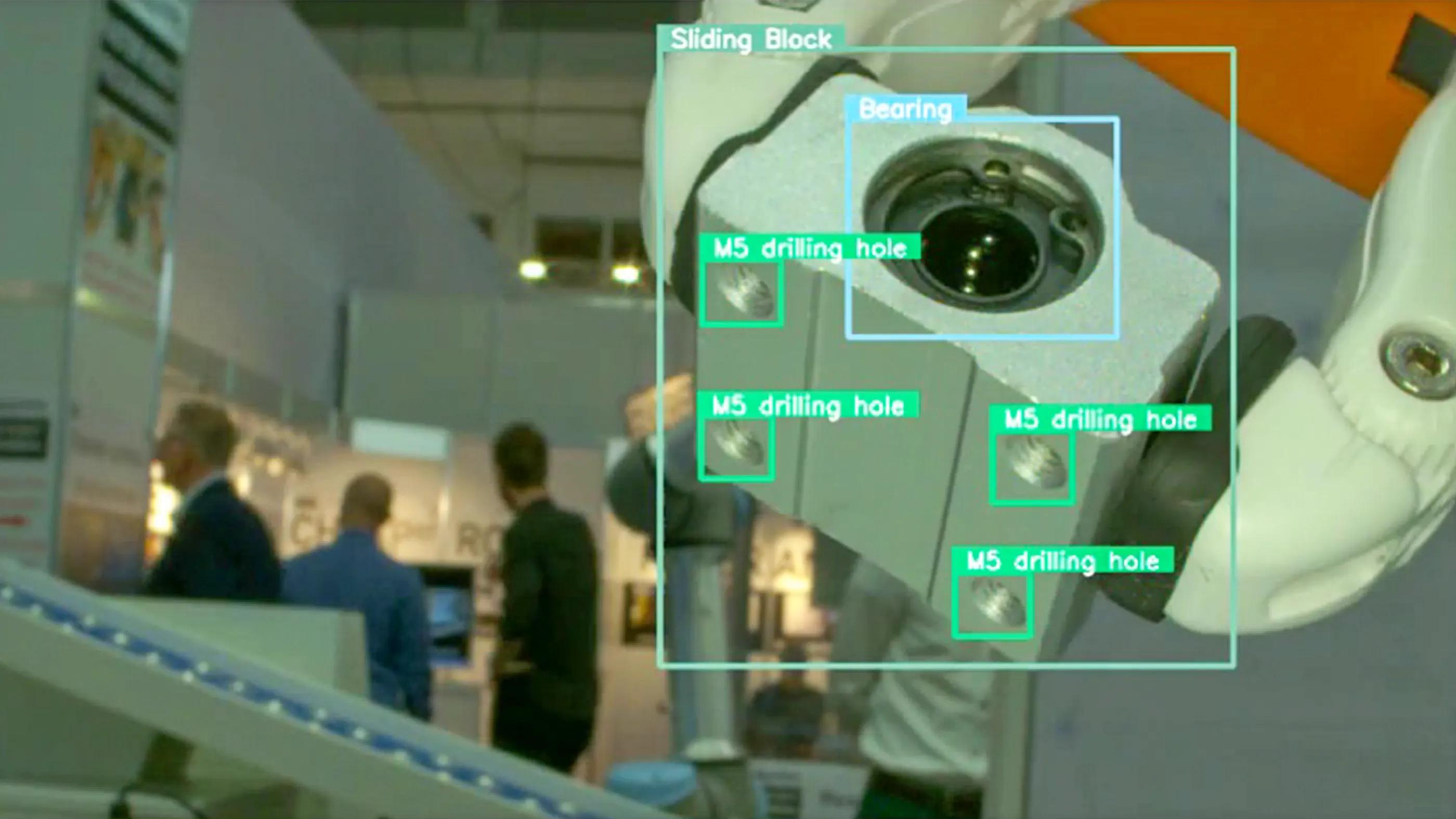
相机让机器人能够感知周围环境、识别物体并执行复杂的任务。为了执行这些任务,机械臂上的相机必须能够补偿振动、实时处理图像数据并提供无缝集成,因此需要采用专为应对这些难题而设计的特殊相机。
适用于机械臂相机的典型应用
Stereo双目立体相机具有抗振性和精巧设计,非常适合在机械臂和动态环境中执行工业应用任务。

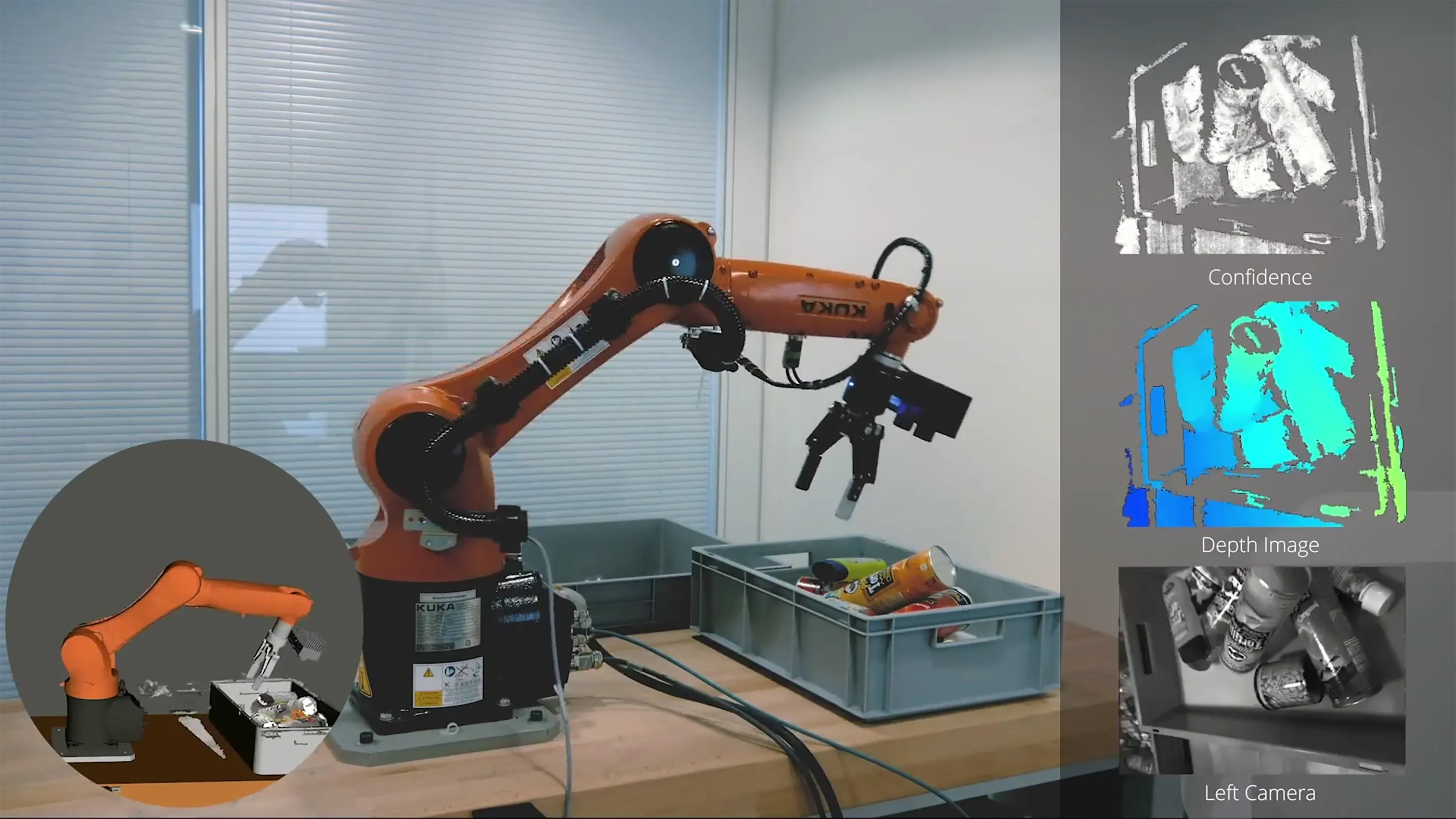
将工业相机安装在机械臂上可构建出精巧灵活的机器人单元。使用机械臂就能自由改变相机的拍摄位置,支持从不同方向以及近距离地精确观察物体。

我们适用于机器人应用的工业级3D Stereo双目立体相机
在机械臂上安装成像效果出色的相机
在机械臂上安装相机可获得显著优势,但也需要事先考虑可能遇到的一些挑战。Stereo双目立体相机专为满足相关应用的要求而开发。

抗振动、抗冲击和防水
机械臂产生的振动会导致图像模糊。我们的Stereo双目立体相机具有足够的机械稳定性来避免该问题,并且还充分考虑到了生产环境中的严苛条件:
抗振动能力最高可达5 g,抗冲击能力最高可达50 g
M12接头确保线缆连接安全牢靠
符合IP54级防水要求
利用实时功能获得可靠的结果
对于许多应用而言,最重要的是在机械臂快速移动时也能实时进行图像处理。
Stereo双目立体相机通过板载处理的方式来提供实时的数据处理功能:即直接在相机上处理图像数据,让系统可以快速做出反应,不需要借助外部计算机。

通过Collision Check功能避免碰撞
机械臂通常只能在狭窄和受限的空间内移动,并且需要连续快速地执行操作,因此很容易导致碰撞,甚至导致相机校准失效。借助Collision Check,即使在狭小空间内,Stereo双目立体相机也能够可靠地工作。
软件模块3D ItemPick、3D BoxPick或3D SilhouetteMatch中的Collision Check功能可防止夹具与其他物体发生碰撞。

轻松集成到机器人应用中
将视觉方案集成到机器人控制器中,可对提高机器人应用的效率和可靠性产生至关重要的影响。它可以无缝集成到现有的机器人单元中,并与各种机器人和夹具系统兼容。
凭借以太网接口,Basler Stereo visard双目立体相机可确保数据传输快速稳定,并可轻松集成到现有系统中。
提供软件界面:集成模块和示例程序适用于许多常见的机器人品牌,可将视觉方案集成到机器人控制器中。
适用于KUKA的EKI Bridge
适用于Universal Robots的URcap
适用于ABB(阿西布朗勃法瑞)、FANUC(发那科)、和Techman Robot(达明)的通用机器人接口(GRI)。Franka Robotics、Fruitcore Robotics和Yaskawa(安川)的接口即将上线,欢迎垂询获取。

相机和机械臂的精确校准
在机器人系统使用相机检测物体之前,需要先进行一次手眼校准,它才能使用夹具或工具与物体交互。因为系统必须事先知道如何将相机的坐标转换为机器人的坐标。
简单易用:这个手眼校准步骤可通过Web GUI手动完成,也可以通过REST API接口以编程方式来完成。

轻巧紧凑
机械臂无法容纳过大的额外重量。
轻巧:重量轻,低至0.68 kg
紧凑:135mm×75mm×96mm
这些产品设计特点可以尽量减少机器人上的额外负载,更容易将成像功能集成到系统中。
用于机械臂的Stereo双目立体相机的优势
Stereo双目立体相机可以为需使用先进相机系统的机器人应用提供完美视觉方案。它可以带来以下优势:
自主数据处理和实时功能:
得益于板载处理,相机可在无需外部计算资源的情况下处理图像数据,从而与机械臂快速交互。
精确的3D成像:
非常适合箱盒取物等应用,可检测3D物体并计算其准确位置。
设计坚固:
适用于机械臂等工业用途和动态应用。
简易集成:
通过以太网连接和软件界面,可以轻松将相机集成到机器人系统中。通过REST API接口确保手眼校准,并保证相机能够轻松适应相应的机器人系统。
Basler机器人应用软件
