体积测量可在出库物流过程中确保高效完成装箱作业
3D相机负责测量包裹和托盘笼的装载水平
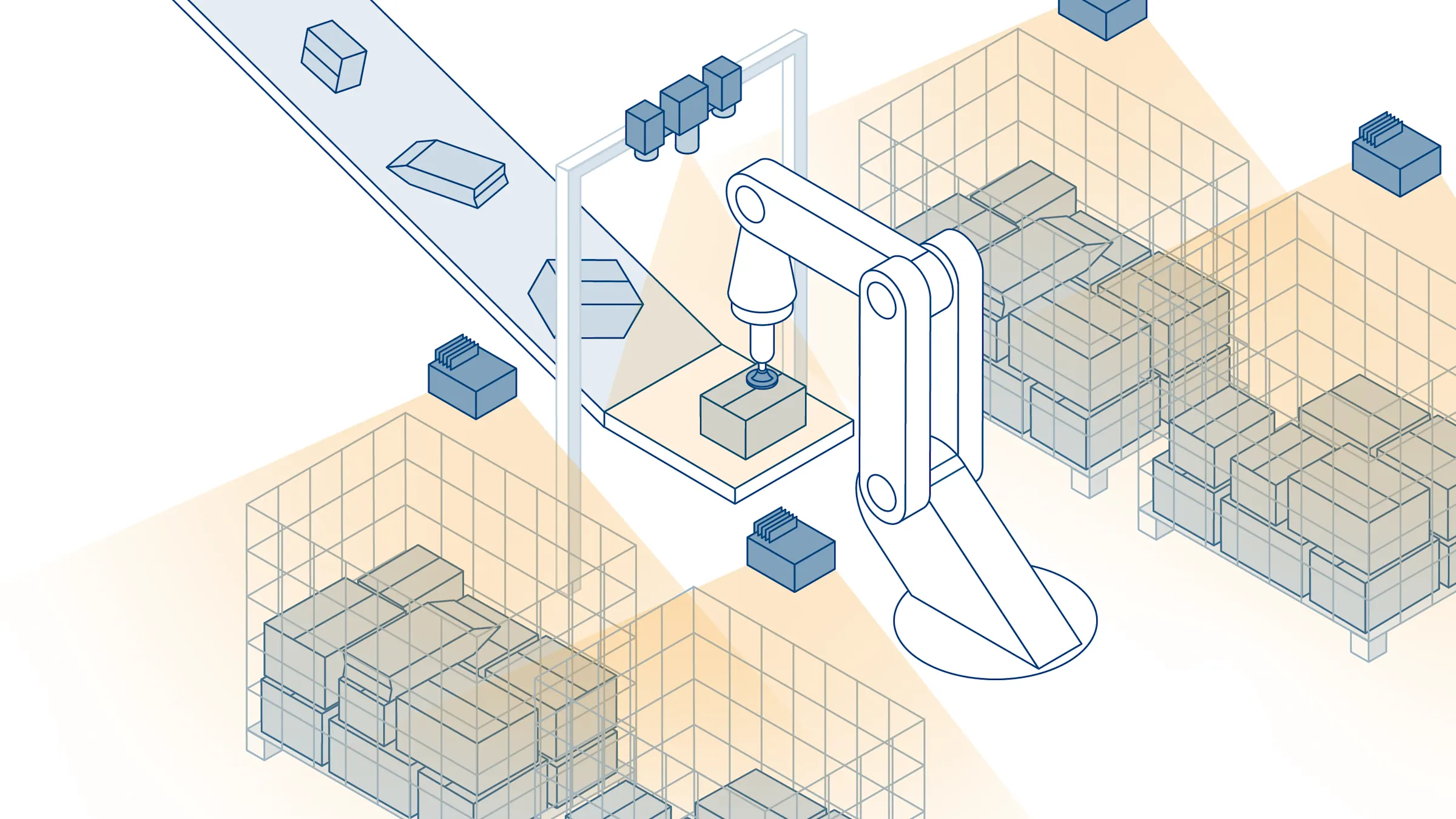
在出库物流中,一项关键的任务就是安全高效地将包裹打包装入托盘笼、托盘和其他载货工具中。精确记录包裹和货物的体积有助于充分优化利用现有的装载空间,确保顺利完成后续的分派工作。双目立体和ToF (Time-of-Flight)相机技术可精确测量包裹,检测托盘笼中的空隙,从而实现出色的装箱作业。机器人可以自动执行所有流程步骤。
装箱过程的基本依据是按照邮政路由代码进行分类
要完成最后一公里的包裹和货物配送工作,必须先按目的地区域进行分类。这些信息包含在邮政路由代码中,而邮政路由代码则包含在条码和QR二维码中,以便通过数字化方式创建运输标签。在我们的使用实例中,您可以了解到哪种图像处理系统可以同时读取不同的一维码和二维码,并实现文本识别 (OCR):
使用实例《机器视觉技术可读取任何放置方向的代码和文本》双目立体视觉可实现最高精度,而ToF技术可提高效率
根据目标区域识别相应包裹,并将其传送到存储空间的表层。在那里,利用双目立体技术对它进行测量和定位。物流机器人拾取包裹后,再使用第二台采用ToF技术的3D相机,它根据各个包裹的目标区域来确定在托盘笼中的适当摆放位置,让物流机器人能够以最优化的方式装载托盘笼。
据我们的观察,在仓库和物流流程中仍存在大量的人工作业步骤。现代化的图像处理视觉方案可以将许多领域的子步骤自动化,以减轻员工的工作负担,并在流程链上进行质量检查。

借助双目立体视觉技术,实现毫米级的尺寸测量精度
在150厘米的工作距离下,3D Stereo ace相机安装 STA-200-547M-082616-W芯片 在存储区域的上方。它负责测量包裹,并在下一个步骤中,根据尺寸来在托盘笼中确定合适的摆放位置。
结合负责处理3D数据的工业计算机,尺寸标注时间可低于200毫秒。为了相应地缩短处理时间,上述的优化非常有必要。我们还建议在计算架构中提供GPU支持。

通过精确定位包裹表面,实现无损抓取
Stereo ace相机提供的三维深度数据还能有效实现包裹的精确定位。与其他3D方法相比,即便是遇到特征各不相同的表面,双目立体视觉技术在顶部边缘也能实现卓越的检测精度。机器人应用软件模块3D Boxpick+Match可以检测包裹并确定精确的拾取点,保证机器人的真空抓手能够安全地抓取包裹,不存在损坏风险。
要想实现高精度的边缘检测,关键在于随机点状投射器,它已集成在Stereo ace相机中:投射器会将随机的点状图案投射到采集场景中,这样就能在现场几乎没有结构特征的情况下产生纹理。
使用合适的3D相机技术就可以控制机器人,从而细致地处理包裹,避免造成损坏。通过这种方式,计算机视觉技术可以提高应用准确性、生产力和工作效率,显著为配送中心节省成本。

高效完成装箱作业:使用ToF技术检测装载水平
安装在包裹箱上方的3D ToF相机可实时测量箱内的剩余空间,并将这些数据与刚刚拾取的包裹的尺寸进行比较,然后为每个包裹寻找合适的位置或最高效的放置空间。这个工序对精确度的要求较低,因此 Basler ToF相机-102 nm版 可以使用成本效益更高的3D技术。
兼容常见的机器人品牌
借助软件界面,我们的视觉产品可兼容多种机器人和抓取系统。我们的机器人专家非常乐意为您的项目提供建议。

