视觉引导机器人
具有视觉能力的智能机器人:为一系列应用场景提供更多功能和灵活性
机器人可以执行人类不可能或难以完成的任务。机器视觉为机器人赋予了“视力”,并开辟了永无止境的应用潜能。机器视觉使机器人更加灵活,并有助于扩大应用领域。我们能够以出色性价比,为您提供定制化的视觉方案。

通过完美的兼容性实现快速集成
可兼容KUKA(库卡)、FANUC(发那科)、Universal Robots(优傲)、Schmalz(施迈茨)以及众多知名品牌的机器人符合ROS和GenICam标准
Basler 2D相机和3D相机符合ROS 1、ROS 2和GenICam标准,可轻松实现标准化集成即插即用:USB 3.0和GigE/5GigE
标准接口的数据传输量高,支持工业PC和嵌入式系统选择丰富的产品线
除了可完美兼容的硬件外,我们还提供适用的软件产品线,以供进行图像采集和处理
借助视觉的力量:通过机器视觉实现智能机器人
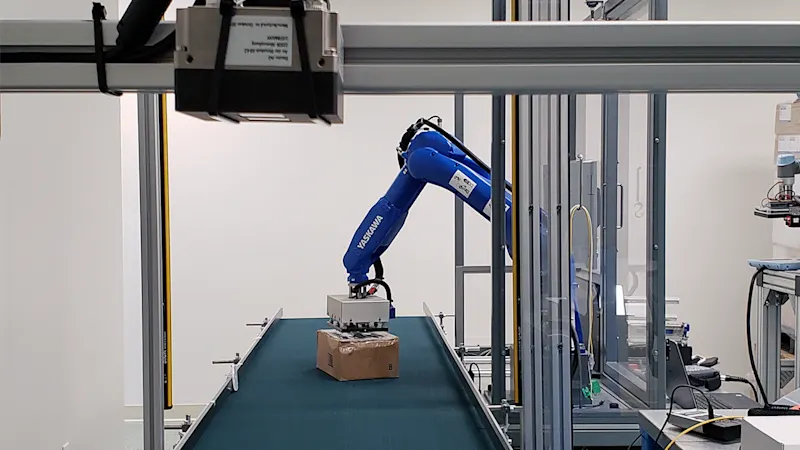
现代工业机器人可通过图像处理系统实现更多功能:它能够采集精确的细节并用于控制自身的运动方式,通过实时评估图像数据来校正移动方向。所有这些功能都扩大了机器人在生产和物流中的应用潜力。

借助机器视觉实现更灵活的生产流程
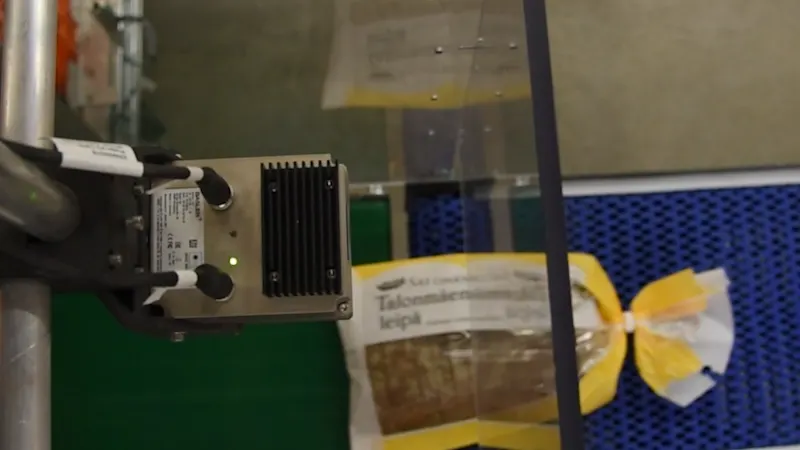
如果没有图像处理技术,组件未得到精确定位,那么即使是从预定义的位置抓取组件这样简单的任务也无法实现。而视觉系统可以易如反掌地解决这些问题:包括由相机记录组件位置、计算偏差,并将校正后的2D或3D坐标传递给机器人控制器。
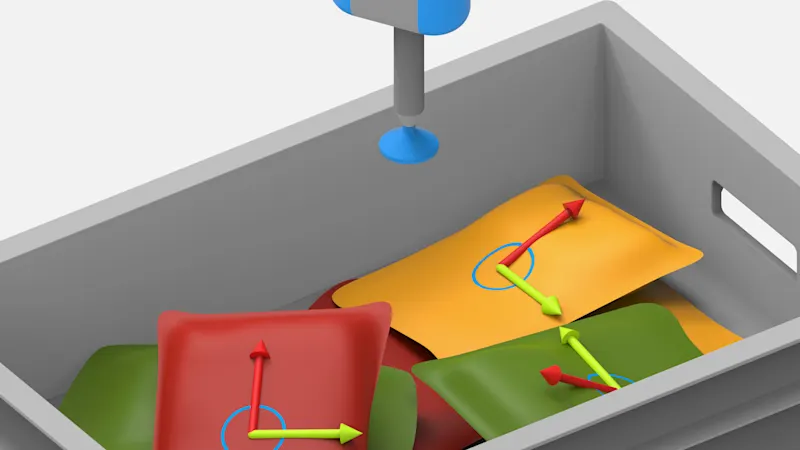
最出色的功能就是实现箱盒取物,系统必须从杂乱无序的组件中进行精确抓取。视觉系统需要先识别下一个要抓取的有形组件,确定其准确的3D位置,并将数据传输到机器人。如果没有图像处理技术,这项任务将无法顺利完成。
尤其是在人机协作机器人方面,视觉系统也发挥着关键作用。它通过避免碰撞来提高安全性,保护人员的安全。同时,通过更精确的运动来降低成本和停机时间,它可以防止损坏工件和设备。
为您的机器人应用找到合适的视觉系统
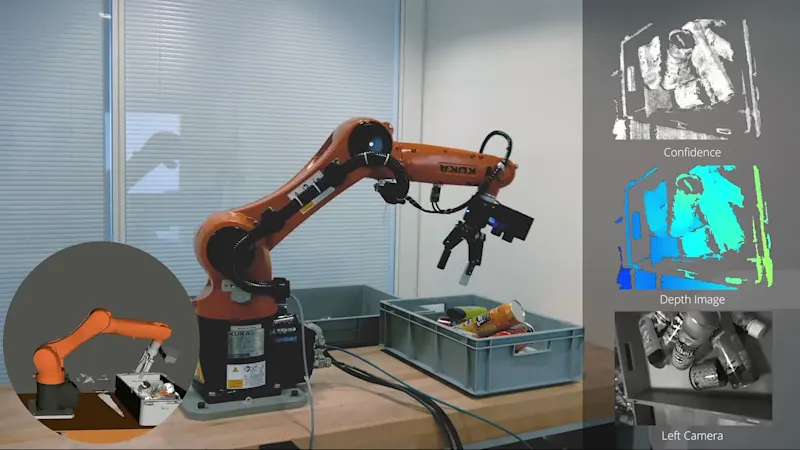
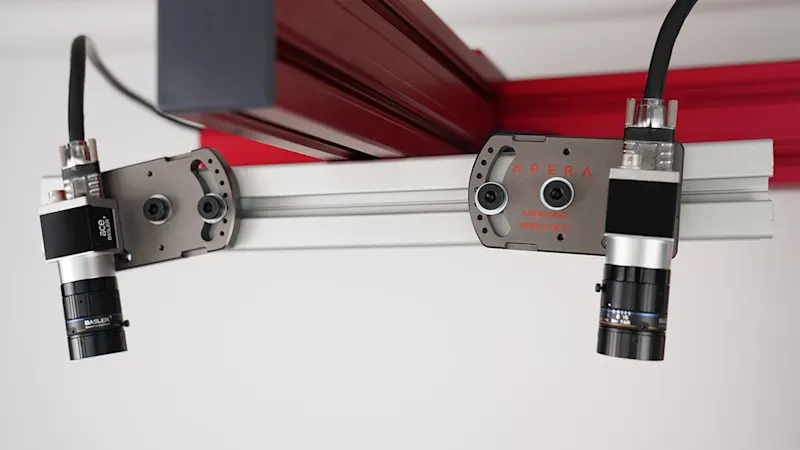
视觉系统的选择和设置对于机器人应用的成功至关重要。相机的定位是其中一个关键因素:它既可以进行“离臂”式固定安装,也可以直接连接到机械臂实现“臂上”安装。后者需要使用轻便耐用的相机和抗振型线缆。
另一个关键因素是用户应该选择传统的工业相机还是智能相机。工业相机可借助外部处理来提供高精度和快速处理,而智能相机则可通过集成的图像评估功能来取得优势。最终的选择取决于具体应用所需的精度、速度和环境条件等要求。
在相机的基础上,光源、光学配件和布线也发挥着核心作用。使用定制化的光源和抗扭线缆,确保系统即使在严苛的条件下也能可靠运行。


通过系统兼容性实现快速集成
Basler产品已证明能够兼容KUKA(库卡)、FANUC(发那科)、Universal Robots(优傲)、Denso(电装)、Techman以及SCHMALZ(施迈茨)抓取系统,还有众多其他机器人品牌,均可与我们的视觉系统顺利配合使用。
Basler 2D和3D相机的ROS 1和ROS 2兼容性
Basler视觉组件可集成到FANUC(发那科)等多种操作系统中
软件连接器,例如适用于KUKA、Universal Robots和Franka Emika
请联系我们以获取有关兼容性的更多详细信息。
软件是智能机器人系统的关键组成
除了正确的视觉硬件外,还需要选择合适的软件,才能确保以经济高效的方式实现“具备视觉能力”的机器人单元。机器人和夹具通常需要使用专有控制装置。要想实现无缝的集成,这需要事先经过深思熟虑的概念设计。项目成本的较大部分都是由开发时间产生的。因此,使用强大的软件视觉方案和直观的编程工具,这对于快速有效地处理复杂任务至关重要。

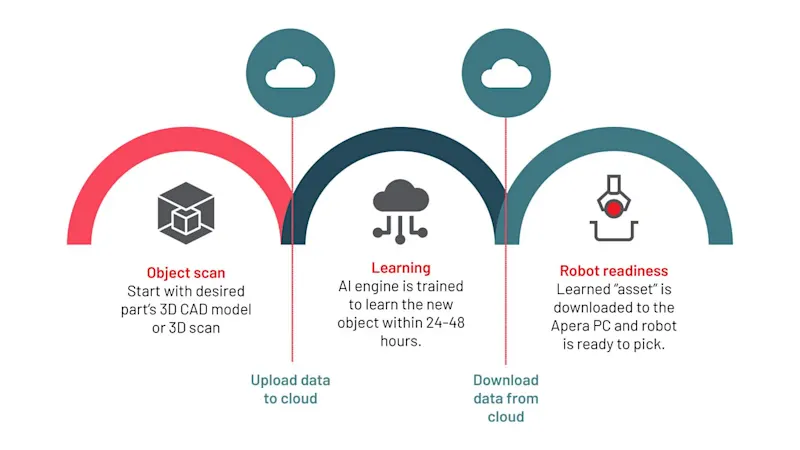
适用于机器人的3D应用软件
各个软件模块都是为典型机器人应用而专门设计的,适用于物体识别、拾取任务和导航等应用。用户可通过即插即用的方式在各个应用中激活模块,它支持直观化的操作,有助于将整体系统成本保持在较低水平。
查看机器人应用软件
将2D图像处理技术作为机器人应用的补充
Basler pylon软件套装不仅可以进行配置和采集图像。通过集成的pylon vTool,它还可以实现高性能的图像处理功能。
pylon SDK软件可作为所有相机型号的编程接口,适合入门,助力实现高生产效率并维持应用稳定
适用于相机评估且具备强大工具的pylon Viewer
pylon驱动程序和GenTL适用于Windows、Linux、macOS和Android的驱动程序,性能稳定且经过认证。
pylon vTool支持物体定位、测量或代码识别等图像处理功能
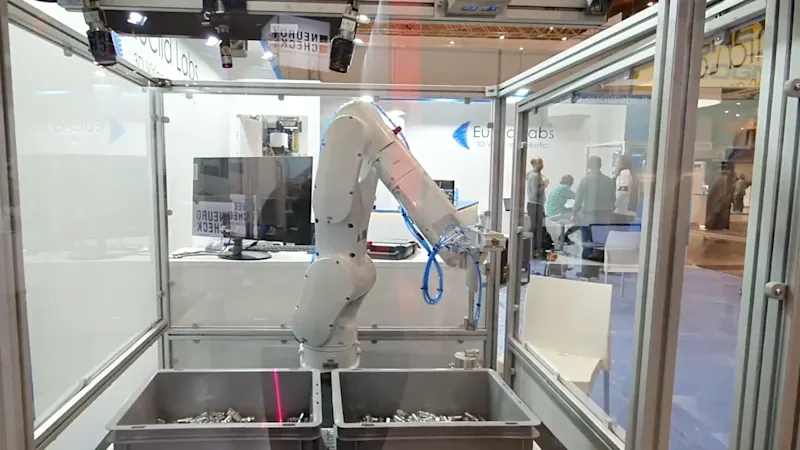
机器人技术应用实例
图像采集系统的实际运用可以为各种应用节省宝贵时间和成本。您不妨放心选用我们的定制化视觉方案。

常用产品
在该行业的应用中,要想实现高效可靠的机器视觉技术,以下Basler产品就是正确之选:








